La introducción de nuevas tecnologías en los automóviles están permitiendo el desarrollo de los llamados sistemas avanzados de ayuda a la conducción. Estos avances permiten ofrecer al conductor apoyo en situaciones de riesgo de accidente, bien sea por salida de la vía, por alcance a otros vehículos o por atropellos a peatones o ciclistas.
Dentro del programa SEGVAUTO, investigadores del Laboratorio de Sistemas Inteligentes de la Universidad Carlos III, están desarrollando un sistema inteligente para evitar colisiones basado en lo que han llamado «fusión sensorial».
La fusión sensorial incluye escáner láser, visión por computador y sistema de navegación GPS de alto rendimiento para monitorizar el movimiento y el entorno del vehículo en todo momento.
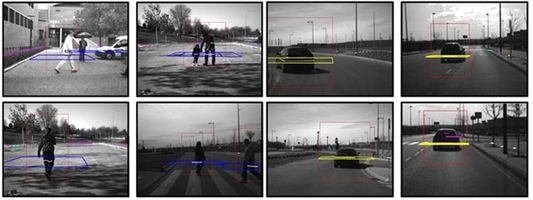
La combinación de estos sistemas permiten reconocer lo que se denominan «regiones de interés» en las que se detecta algún tipo de elemento. Un algoritmo de clasificación, basado en patrones del movimiento, decide si el elemento detectado por el escáner láser en la región de interés se corresponde con un peatón o un vehículo. En una segunda fase, el sistema de visión por computador se encarga de refinar la detección de vehículos y peatones de forma independiente. Por último, ambas detecciones se combinan para obtener la localización concreta del obstáculo y el movimiento que lleva.
Así, conocido el tipo de elemento de que se trata, su posición exacta, su movimiento y velocidad se puede calcular si existe algún riesgo de colisión y alertar al conductor para que tome las precauciones oportunas. Este sistema ha sido desarrollado en la plataforma IVVI 2.0, un vehículo experimental para el desarrollo de Sistemas de Asistencia a la Conducción.